Découvrez comment l’approche innovante de DxO divise par quatre la taille des fichiers DNG sans compromettre la qualité d’image

DxO PureRAW 6 introduit une nouvelle option de compression haute fidélité pour le format DNG, qui réduit d’environ quatre fois la taille des fichiers par rapport à la compression sans perte actuelle, tout en préservant intégralement la qualité d’image perçue.
Les principaux avantages pour les utilisateurs
- Un flux de travail entièrement automatique. Une simple case à cocher permet d’activer la détection et la suppression des poussières. Les utilisateurs peuvent traiter toute une série de photos simultanément pour obtenir des images parfaitement nettoyées.
- Une sensibilité réglable. Un curseur permet de doser l’équilibre entre la détection exhaustive de toutes les taches potentielles (haute sensibilité) et la réduction du risque de faux positifs (faible sensibilité).
(Cela dit, nous vous recommandons quand même de nettoyer votre objectif de temps en temps ! 😉)
Le problème
La poussière a tendance à s’accumuler sur les capteurs et les objectifs des appareils photo à objectifs interchangeables. Ces particules projettent de petites ombres floues sur les images. Elles sont particulièrement visibles dans les zones lisses et unies comme les ciels ou les fonds de studio.
Depuis longtemps, les photographes ont appris à corriger ce problème en post-traitement, à l’aide d’outils de réparation, de correction et de retouche. Mais quand ils se retrouvent avec des images très marquées par ce phénomène ou quand ils doivent traiter un très grand nombre de photos, l’opération devient vite fastidieuse.
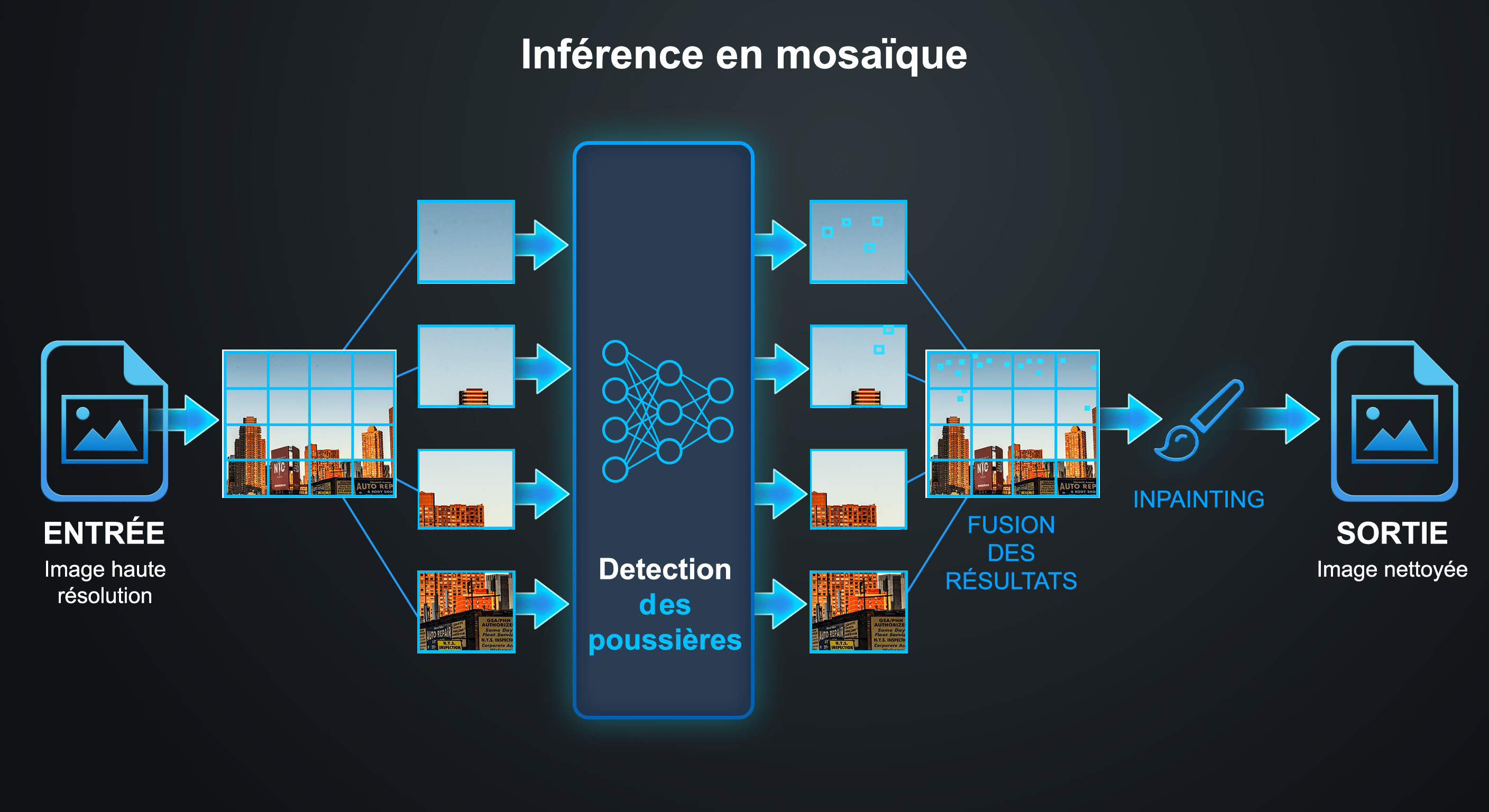
DxO PureRAW 6 automatise ce processus. Un premier algorithme de détection analyse l’image pour repérer les taches de poussière, puis un deuxième algorithme d’inpainting les efface automatiquement, une par une.
Pourquoi la détection des poussières est-elle complexe ?
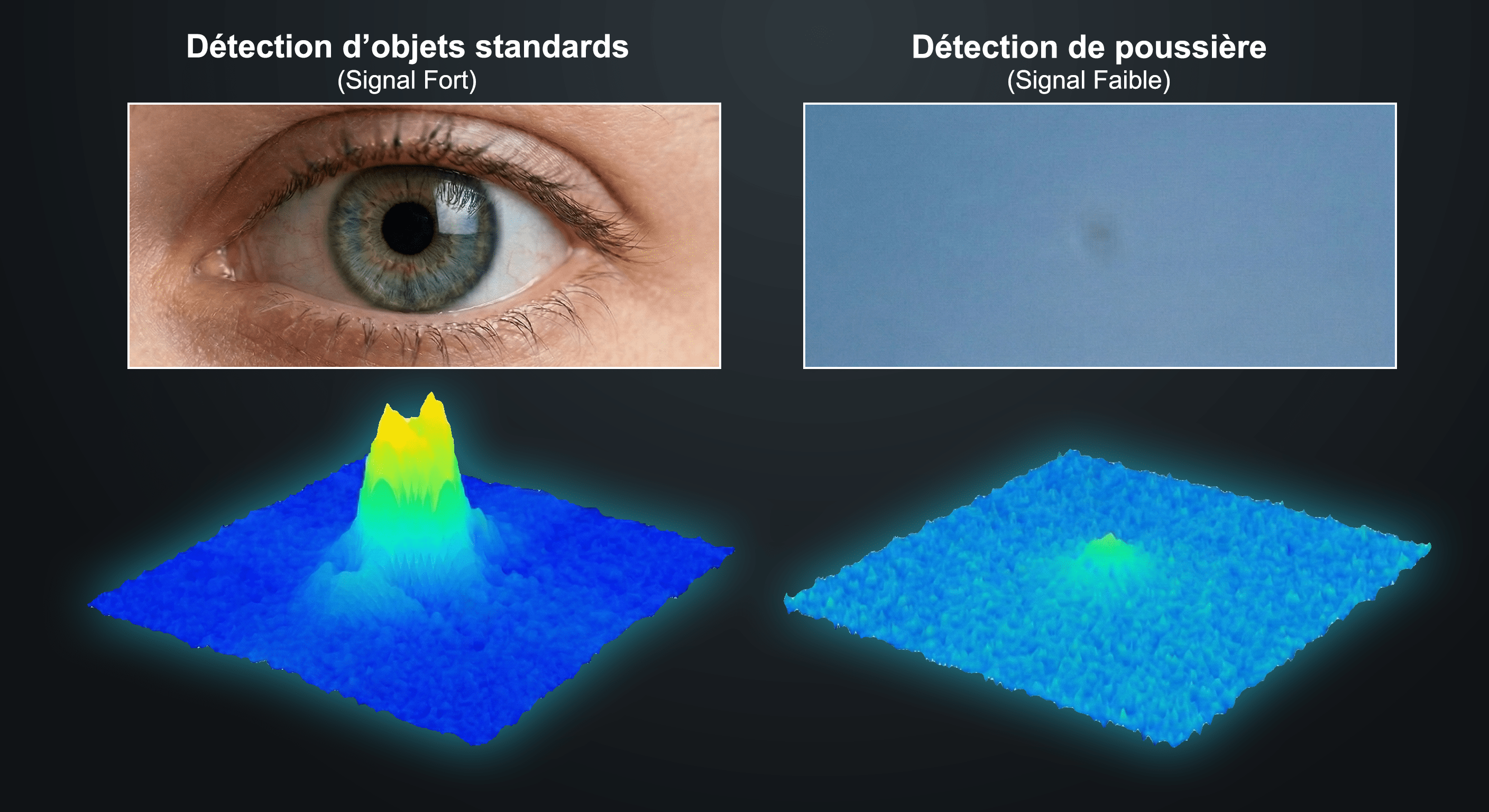
À première vue, les poussières du capteur sont plutôt faciles à décrire : il s’agit de petites taches sombres plus ou moins circulaires. Mais cette apparente simplicité est trompeuse. Ces taches présentent en effet plusieurs propriétés qui les rendent étonnamment difficiles à détecter.
Une subtilité extrême. La plupart des taches de poussière n’atténuent qu’une petite proportion de la lumière incidente, souvent entre 5 et 20 % seulement. Les marques sont à peine perceptibles, contrairement à des taches opaques, et leur visibilité dépend fortement du contenu de l’image concernée.
Une surface minuscule. En pleine résolution, une tache de poussière ne couvre en général que quelques pixels, ce qui est trop peu pour que les détecteurs d’objets généralistes, qui sont optimisés pour détecter des personnes ou des véhicules, parviennent à la repérer.
Une structure insuffisamment détaillée. Contrairement aux objets que les détecteurs classiques identifient facilement (un visage avec des yeux, un nez et une bouche, ou une voiture avec des roues et des vitres, par exemple), les taches de poussière n’ont que très peu d’informations à montrer aux réseaux neuronaux. En substance, il s’agit simplement d’une légère marque, sombre et floue.
Une variabilité gigantesque. L’aspect d’une tache de poussière dépend de la taille et de la forme de la particule, de sa distance par rapport à la surface du capteur, de l’ouverture de l’objectif, ainsi que de la couleur et de la luminosité de ce qui se trouve derrière. Certaines taches présentent des contours nets et circulaires, tandis que d’autres sont floues et plus diffuses, comme un halo. Certaines semblent presque noires sur un ciel lumineux et d’autres ressemblent beaucoup à du bruit. Cette diversité est en fait bien plus grande qu’il n’y paraît. Puisque tout dépend de l’ouverture et ce qui se trouve derrière, les mêmes particules physiques peuvent avoir un aspect très différent d’une photo à l’autre.
Le modèle de détection : RF-DETR
Cette fonctionnalité repose surt RF-DETR, un modèle de détection d'objets basée sur une architecture Transformer. Nous avons évalué plusieurs architectures de détection, dont plusieurs générations de modèles basés sur des réseaux neuronaux convolutifs. Nous avons retenu RF-DETR pour plusieurs raisons :
Une précision supérieure. RF-DETR obtient les meilleurs scores sur les benchmarks standards de détection d’objets et dépasse de nombreuses alternatives connues.
Plusieurs tailles de modèles. Les variantes Nano, Small, Medium, Large et XL permettent de trouver le meilleur compromis entre précision et coût de calcul. Nous avons retenu la variante Medium (33 millions de paramètres).
Une architecture indépendante de la résolution. RF-DETR ne contient aucune couche entièrement connectée susceptible de figer la résolution d’entrée. Cette flexibilité est essentielle pour notre stratégie d’inférence en mosaïque : l’image est divisée en blocs de 512 × 512 pixels qui se chevauchent, et le modèle de détection s’exécute indépendamment sur chaque bloc. Les résultats sont ensuite fusionnés sur l’ensemble de l’image.
Dans les benchmarks standards, RF-DETR détecte des dizaines de catégories d’objets : personnes, véhicules, animaux, mobilier, etc. Pour notre cas d’usage, nous avons réentraîné le modèle pour qu’il reconnaisse une seule classe d’objets : les taches de poussière. La difficulté n’est pas liée à la classification, mais à la détection elle-même, puisqu’il faut repérer de minuscules éléments faiblement contrastés dans une image de grande taille.
Les données d’entraînement
Entraîner un détecteur de poussières fiable exige de montrer au réseau neuronal un très grand nombre d’exemples couvrant toutes les combinaisons imaginables de formes, d’opacité, de flou et d’arrière-plan.
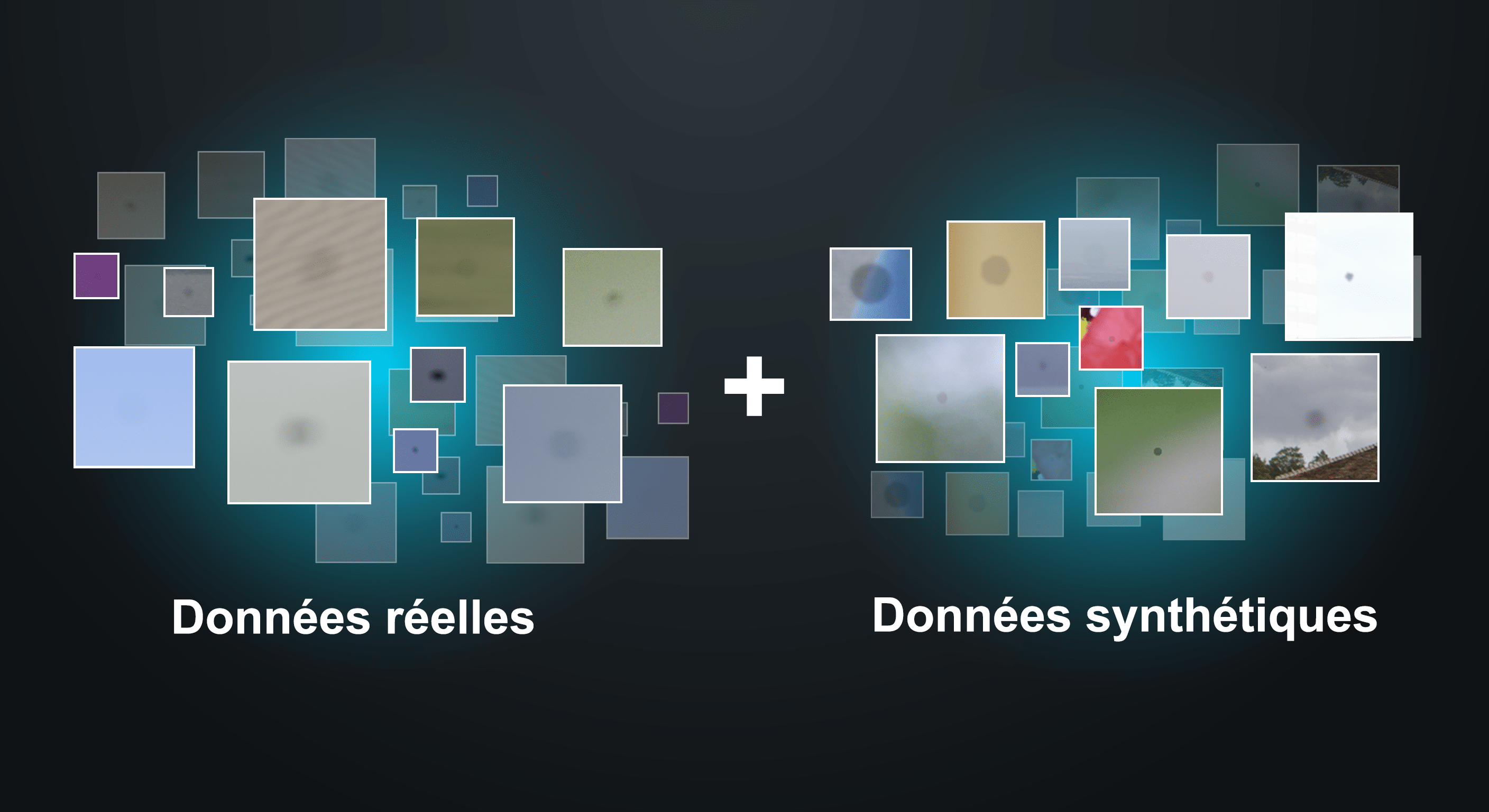
Nous avons commencé par collecter des milliers de photos réelles contenant de vraies taches de poussière, qui ont toutes été soigneusement annotées manuellement. Cet ensemble de données authentiques couvre déjà une grande diversité de formes, de tailles, d’opacité, de niveaux de flou et d’arrière-plans, mais nous tenions à aller plus loin.
Forte de son expertise en traitement des images et des signaux, notre équipe de recherche a mis au point un synthétiseur de poussière. Cet algorithme compact est capable de générer une tache de poussière indiscernable d’une tache réelle, puis de l’incruster sur l’arrière-plan d’une photo ou sur un arrière-plan synthétique choisi de façon aléatoire. Le synthétiseur modélise les principales propriétés physiques des vraies poussières : forme irrégulière de la tache, atténuation différente de la lumière sur chaque canal dans l’espace linéaire, flou qui adoucit les contours et ombres directionnelles générées par certaines particules. Chaque paramètre est randomisé dans des plages soigneusement calibrées à partir d'une analyse statistique de taches de poussière réelles.
Cette approche synthétique garantit une distribution homogène des caractéristiques des poussières et des arrière-plans sur l’ensemble des données d’entraînement, et évite donc les biais qui surviennent inévitablement quand l’ensemble de données est constitué manuellement. Elle garantit par exemple que le réseau voit suffisamment de taches très légères, suffisamment de taches très petites et suffisamment d’arrière-plans inhabituels, des combinaisons qui seraient forcément sous-représentées dans une collection composée uniquement de vraies images.
Au cours de son entraînement, notre réseau de détection des poussières a au total observé environ un million de taches de poussière, réelles ou synthétiques.
Pour les photographes passionnés.