DeepPRIME XD3: KI-gestützte Rauschminderung und Demosaicing der vierten Generation
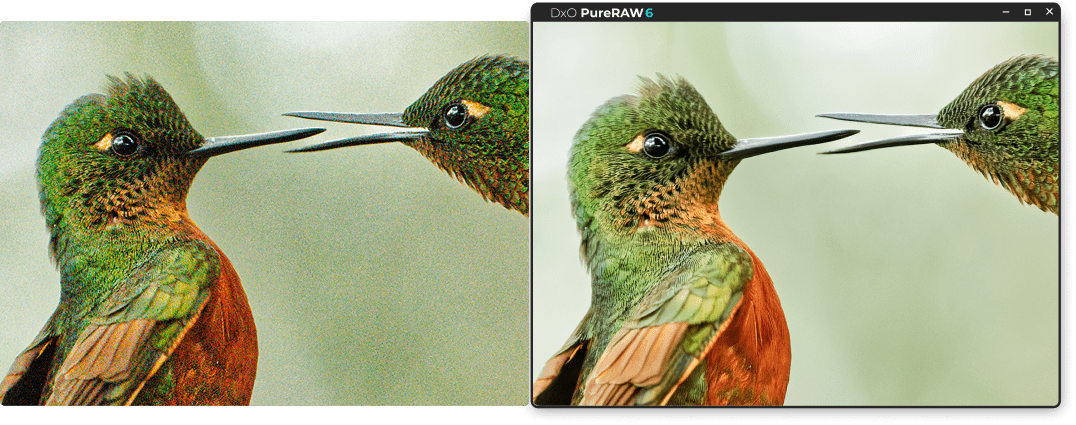
DxO PureRAW6 führt DeepPRIME XD3 für Bayer-Sensoren ein, die neueste Generation von DxOs Deep-Learning-Engine für die Verarbeitung von RAW-Bildern. Ein einziges neuronales Netz übernimmt jetzt drei Aufgaben gleichzeitig — Rauschminderung, Demosaicing und Korrektur chromatischer Aberrationen — und liefert Bilder mit noch feineren Details als sein Vorgänger.
Die Technologie basiert auf drei zentralen Säulen: einer neuen Multitasking-Formulierung, die das Netz um die Korrektur chromatischer Aberrationen erweitert, einer optimierten Faltungsarchitektur, die aus umfangreicher Forschung hervorgegangen ist, und einer deutlich verbesserten Trainingspipeline, die die Lücke zwischen synthetischen Trainingsdaten und realen RAW-Bildern schließt.
Die wichtigsten Vorteile
- Bessere Bildqualität. Sauberere Farbwiedergabe, feinere Details und weniger Artefakte, insbesondere bei Hochfrequenz-Texturen und Kanten sowie vor allem bei neueren Sensoren ohne optischen Tiefpassfilter.
- Identische Verarbeitungsgeschwindigkeit. Trotz eines deutlich leistungsfähigeren Netzes läuft DeepPRIME XD3 auf handelsüblicher Hardware genauso schnell wie DeepPRIME XD2s.
- Umfassende Kompatibilität. DeepPRIME XD3 bündelt unsere neuesten Weiterentwicklungen in der RAW-Bildverarbeitung und unterstützt nun sämtliche Sensortypen.
Sechs Jahre Entwicklung
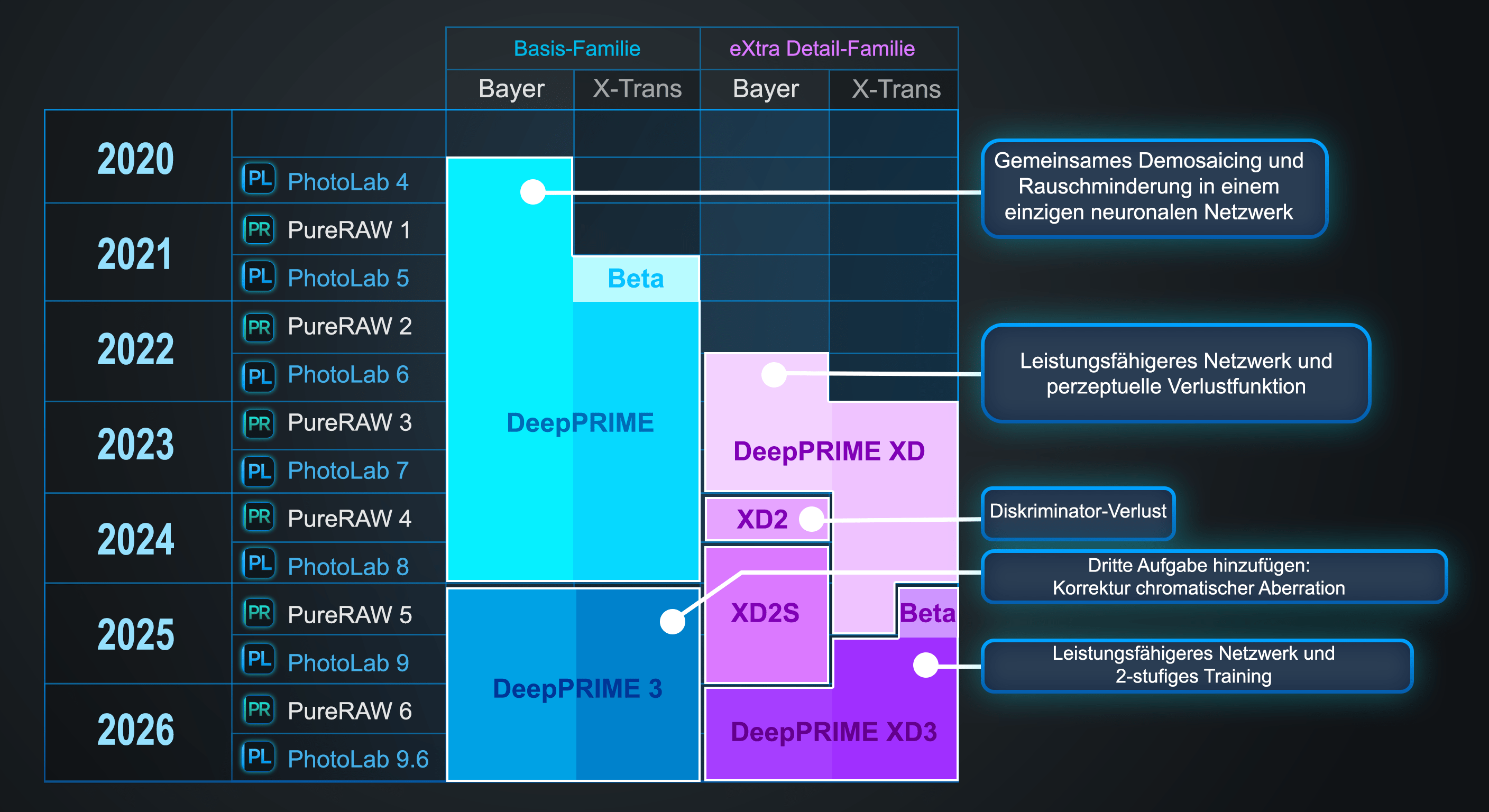
Die RAW-Konvertierung — also der Prozess, bei dem das Mosaik aus verrauschten, einfarbigen Sensormesswerten in ein vollständiges Farbbild umgewandelt wird — steht seit über zwei Jahrzehnten im Zentrum der Expertise von DxO. Im Jahr 2020 stellte DxO DeepPRIME vor – das erste kommerziell verfügbare neuronale Netz, das Rauschminderung und Demosaicing in einem einzigen Verarbeitungsschritt kombinierte.
Seitdem treiben wir die Entwicklung unermüdlich voran — mit dem Ziel, die Bildqualität immer weiter zu verfeinern. Deep Learning und dieser ganzheitliche Ansatz ermöglichten es uns schließlich auch, X-Trans-Sensoren zu unterstützen — eine Sensortechnologie, die in einem Teil des Kameraportfolios von Fujifilm zum Einsatz kommt. Diese Sensoren wurden von unseren klassischen Algorithmen zur Rauschminderung bis dahin nicht unterstützt. 2022 führten wir die „XD“-(eXtreme Details)-Familie ein — eine zweite Generation von DeepPRIME-Engines, die auf maximale Bildqualität ausgelegt ist. Dies ging allerdings mit einem deutlich höheren Rechenaufwand einher und erforderte eine leistungsstarke GPU — oder ein gewisses Maß an Geduld.
2020 — DxO PhotoLab4
DeepPRIME. Zeitgleiches Entrauschen und Demosaicing innerhalb eines einzigen tiefen neuronalen Netzes (nur für Bayer-Sensoren).
2022 – DxO PureRAW 2
DeepPRIME wird auf X-Trans-Sensoren erweitert.
2022 — DxO PhotoLab6
DeepPRIME XD („eXtreme Details“). Leistungsfähigere Architektur und perzeptuelle Verlustfunktion für feinere Details (nur Bayer).
2023 — DxO PureRAW 3
DeepPRIME XD wird auf X-Trans-Sensoren ausgeweitet.
2024 – DxO PureRAW 4
DeepPRIME XD2. Adversarial-Discriminator-Loss (kontradiktorischer Diskriminator-Verlust) für eine natürlichere Bildwiedergabe (nur Bayer).
2024 – DxO PhotoLab8
DeepPRIME XD2s. Verbesserte Kalibrierung des Rauschverhaltens für ausgewählte Kamerabodys.
2025 – DxO PureRAW 5
DeepPRIME 3. Kombination von drei Aufgaben: Rauschminderung, Demosaicing und Korrektur chromatischer Aberrationen (für Bayer- und X-Trans-Sensoren).
2025 – DxO PhotoLab9
DeepPRIME XD3. Leistungsfähigere Architektur und zweiphasiges Training (nur für X-Trans-Sensoren).
2026 – DxO PureRAW 6
DeepPRIME XD3 wird auf Bayer-Sensoren ausgeweitet.
Bei der Entwicklung von DeepPRIME XD3 lag es nahe, zunächst den Fokus auf X-Trans zu legen: Die X-Trans-Version von DeepPRIME XD war älter und leichter zu optimieren als DeepPRIME XD2s, das bereits für Bayer-Fotografen verfügbar war. Für Letztere entstand dadurch eine etwas kompliziertere Ausgangslage. Bei den meisten Bildern lieferte DeepPRIME XD2s die höchste Qualität – bei bestimmten Aufnahmen mit niedrigem ISO und chromatischer Aberration konnte DeepPRIME 3 jedoch tatsächlich bessere Ergebnisse erzielen. Die Veröffentlichung von DeepPRIME XD3 für Bayer-Sensoren bringt uns endlich zu einer Einfachheit zurück, die wir seit 2023 vermisst haben: Unabhängig von der verwendeten Kamera stehen Ihnen zwei RAW-Konvertierungsmodelle zur Auswahl – eines, das eine ausgewogene Balance zwischen Geschwindigkeit und Bildqualität bietet, und eines, das kompromisslos auf höchste Bildqualität ausgerichtet ist.
Die Herausforderung der Wiedergabe von RAW-Bildern
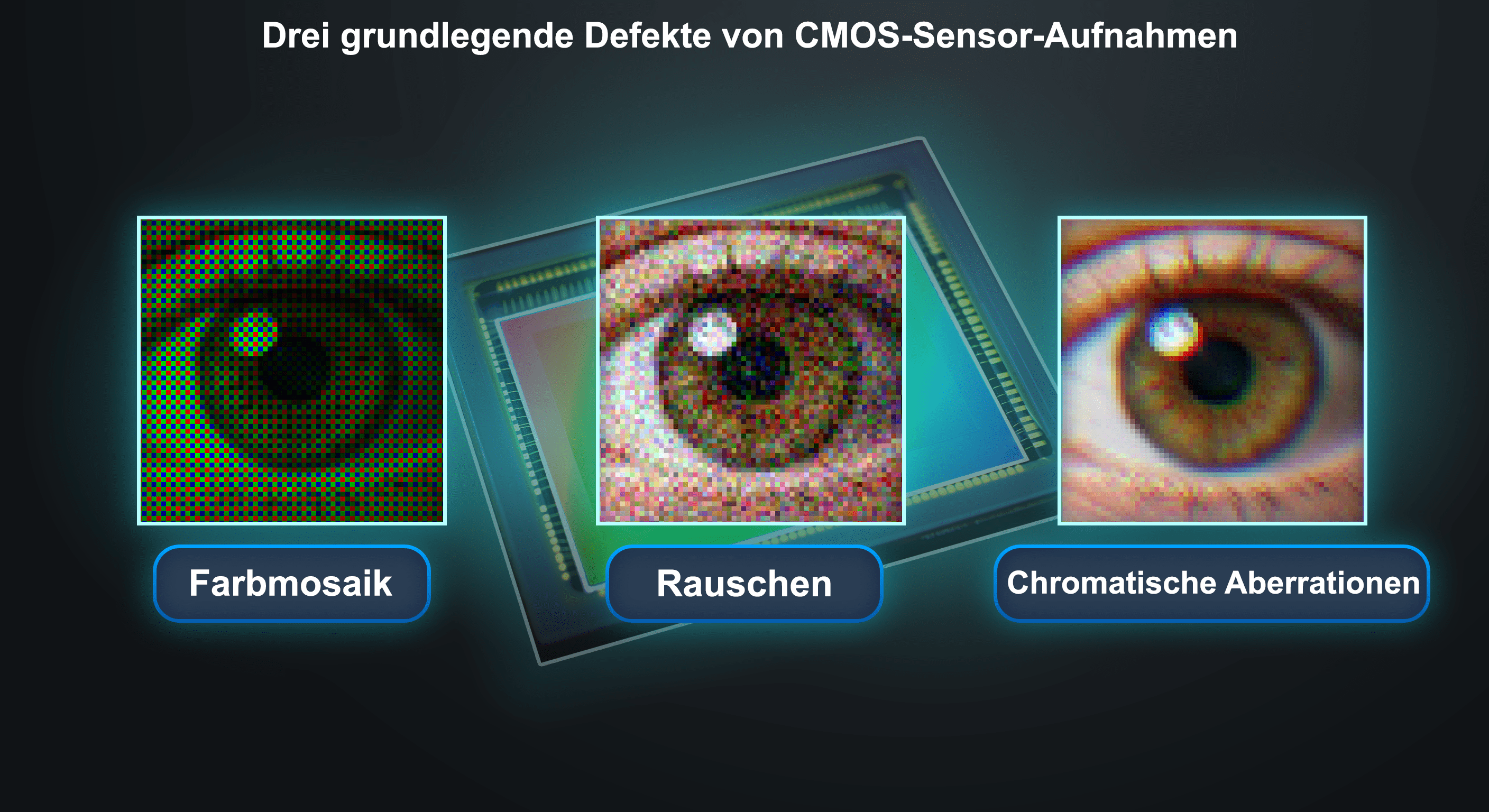
Jedes von einem CMOS-Sensor aufgenommene digitale Bild enthält drei grundlegende Defekte, die allesamt bereits vor der Bearbeitung durch eine Software entstehen:
Farbmosaik. Der Sensor erfasst nicht für jedes Pixel die vollen Farbinformationen. Stattdessen lässt ein Raster winziger Farbfilter jede Fotodiode nur eine der drei Farben (Rot, Grün oder Blau) aufzeichnen. Die Rekonstruktion der beiden fehlenden Farbwerte an jedem Pixel ist die Aufgabe des Demosaicings. In der Digitalfotografie sind zwei Farbfiltermuster verbreitet: Bayer, das von rund 95 % aller Digitalkameras verwendet wird, und X-Trans, das in den verbleibenden etwa 5 % zum Einsatz kommt.
Sensorrauschen. Jede Fotodiode sammelt eine zufällige Anzahl von Photonen. Das daraus resultierende Schrotrauschen, auch Photonenrauschen genannt, ist eine unvermeidbare Eigenschaft des Lichts selbst und wird zusätzlich durch elektronisches Ausleserauschen verstärkt. Bei hohen ISO-Empfindlichkeiten kann Rauschen feine Bilddetails vollständig überdecken.
Chromatische Aberration. Die meisten Objektive fokussieren nicht alle Wellenlängen des Lichts exakt auf denselben Punkt. Das Ergebnis sind kleine laterale Verschiebungen zwischen dem Rot-, Grün- und Blaukanal, die sich als Farbsäume entlang kontrastreicher Kanten bemerkbar machen.
Herkömmliche RAW-Verarbeitung behandelt diese drei Probleme getrennt: Ein Demosaicing-Algorithmus interpoliert die fehlenden Farbwerte, ein separater Rauschfilter reduziert das Bildrauschen, und ein drittes Modul korrigiert chromatische Aberrationen. Jedes Modul arbeitet isoliert, ohne Kenntnis der Entscheidungen der anderen – und kann dabei eigene Artefakte erzeugen, die den folgenden Verarbeitungsschritt zusätzlich erschweren. DxOs Ansatz besteht seit der Einführung von DeepPRIME im Jahr 2020 darin, mehrere Probleme gemeinsam in einem einzigen neuronalen Netz zu lösen. Mit DeepPRIME XD3 erstreckt sich dieses Prinzip nun auf alle drei Defekte.
Drei Defekte, ein Netz
Rauschminderung, Demosaicing und die Korrektur chromatischer Aberrationen gemeinsam zu behandeln, ergibt sich aus ihrer grundlegenden wechselseitigen Abhängigkeit.
Betrachten wir, was passiert, wenn diese Aufgaben voneinander getrennt werden. Die Rauschminderung eines RAW-Bildes setzt ein gewisses Verständnis dafür voraus, wie das Mosaikmuster mit der zugrunde liegenden Szene zusammenhängt — im Grunde ein implizites Demosaicing im laufenden Prozess. Umgekehrt erfordert das Demosaicing eines verrauschten Bildes die Fähigkeit, Strukturen trotz des vorhandenen Rauschens zuverlässig zu erkennen – gewissermaßen eine implizite Rauschminderung. Denn für eine korrekte Farbinterpolation ist die Unterscheidung zwischen echten Kanten und bloßen Rauschfluktuationen entscheidend. Und das Demosaicing eines von chromatischer Aberration betroffenen Bildes stellt nahezu dasselbe Problem dar wie deren Korrektur: Wenn Rot-, Grün- und Blaukanal lateral gegeneinander verschoben sind, setzt die Rekonstruktion der korrekten Farbe für jedes Pixel ein Modell davon voraus, wie das Bild aussähe, wenn die Kanäle korrekt ausgerichtet wären.
Die Aufteilung dieser drei Aufgaben auf drei separate Netze — selbst wenn diese darauf trainiert wären, mit den in der vorherigen Stufe erzeugten Artefakten umzugehen — würde insgesamt mehr gewichtete Parameter und einen höheren Rechenaufwand erfordern, da jedes Netz intern einen Teil der Intelligenz der anderen Netze nachbilden müsste. Das Ergebnis wären längere Verarbeitungszeiten bei gleicher Qualität oder geringere Qualität bei gleicher Geschwindigkeit.
Ein einziges Netz hingegen kann interne Darstellungen für alle drei Aufgaben gemeinsam nutzen. Die Merkmale, die das System zur Kantenerkennung für das Demosaicing erlernt, unterstützen zugleich die Unterscheidung zwischen Signal und Rauschen sowie die Identifikation lateraler chromatischer Abweichungen.
Synthetische Trainingsdaten
Ein neuronales Netz ist nur so gut wie die Daten, aus denen es lernt. Für DeepPRIME XD3 sind sowohl die Qualität und der Realismus der Trainingsdaten als auch die Architektur des neuronalen Netzes selbst von entscheidender Bedeutung.
Das Problem der Trainingsdaten
Als die Forschungsarbeiten zu DeepPRIME im Jahr 2018 bei DxO begannen, stellte sich eine grundlegende Frage: Wie lassen sich Trainingsbeispiele beschaffen, die ein überwacht lernendes neuronales Netz benötigt — also Paare aus qualitativ degradierten Eingabebildern und den zugehörigen perfekten Referenzbildern?
Alle Optionen standen zur Debatte. Zunächst erschien es naheliegend, ein Paar realer Aufnahmen zu erstellen — eine „saubere“ Aufnahme bei niedriger ISO-Empfindlichkeit neben einer verrauschten Aufnahme derselben Szene bei hoher ISO-Empfindlichkeit. In der Praxis erwies sich dieser Ansatz jedoch als unbrauchbar: Die beiden Belichtungen lassen sich nie exakt aufeinander abstimmen, bewegte Motive führen zu Inkonsistenzen, und das Verfahren müsste zudem für jedes von DxO unterstützte Kameramodell und jede ISO-Einstellung erneut durchgeführt werden. Auch der Noise-to-Noise-Ansatz, der Serienaufnahmen statt perfekter Referenzbilder nutzt, kämpft mit vergleichbaren Skalierungsgrenzen. Auch die klassische Datenanreicherung — das Fundament der meisten überwachten Lernverfahren — ist in diesem Fall schlicht nicht praktikabel: Kein Mensch kann ein verrauschtes Mosaik aus einkanaligen Pixelwerten betrachten und daraus für Milliarden von Pixeln eine korrekte, vollfarbige und zugleich rauschfreie Referenzausgabe ableiten.
Übrig blieb die synthetische Datengenerierung: Ausgehend von makellosen, hochwertigen Fotografien werden die Defekte simuliert, die ein realer Kamerasensor erzeugen würde. Jedes Trainingsbeispiel besteht somit aus einem Paar: einem synthetisch degradierten Bild und der ursprünglichen makellosen Version als Ground Truth. Auf dem Papier ist dies bei Weitem die am besten skalierbare Lösung. DxO unterstützt über 600 Kamerabodys mit jeweils rund 20 ISO-Einstellungen — das ergibt mehr als 12.000 mögliche Konfigurationen. Und diese Zahl berücksichtigt nur das Rauschen: Chromatische Aberration hängt vom Objektiv, der Blende, der Zoomeinstellung und der Entfernungseinstellung ab. Würde man für jede Kombination aus Kamera, ISO-Einstellung und Objektiv reale Bildpaare aufnehmen, würde die Zahl der erforderlichen Konfigurationen auf mehrere Millionen anwachsen. Die synthetische Generierung kann all diese Kombinationen aus demselben Pool von Ground-Truth-Bildern abdecken.
Die Verteilungslücke
Die Herausforderung bei synthetischen Daten ist ein Phänomen, das als Verteilungslücke (Distribution Gap) bezeichnet wird: dem statistischen Unterschied zwischen den simulierten Trainingsbildern und den realen RAW-Dateien, denen das Netz im praktischen Einsatz begegnet.
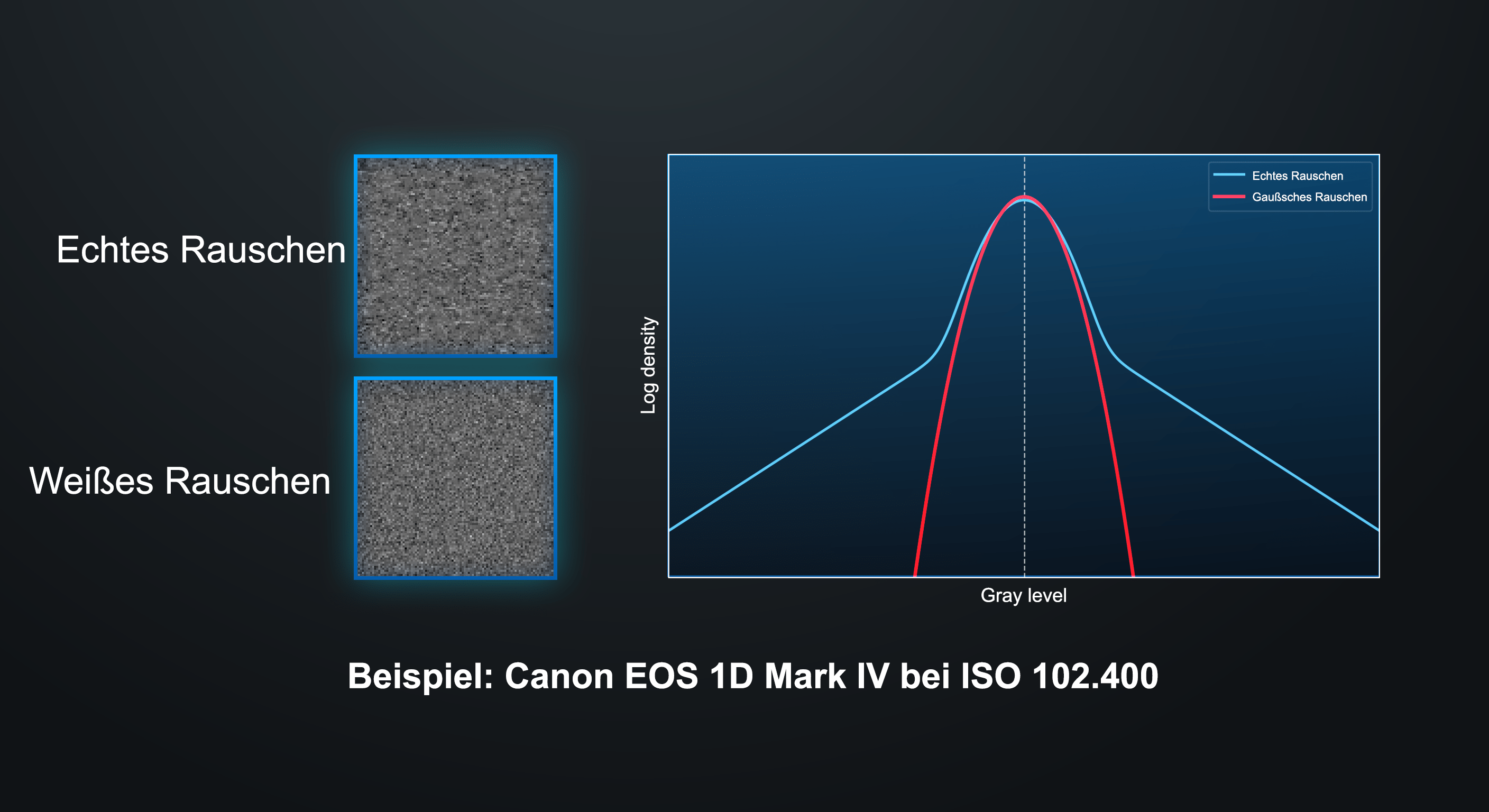
Eine einfache Simulation — bei der die Farbkanäle leicht gegeneinander verschoben werden, um chromatische Aberration nachzuahmen, zwei der drei Farbwerte entfernt werden, um das Bayer-Mosaik zu simulieren, und anschließend weißes Gaußsches Rauschen hinzugefügt wird — genügt, um die oben dargestellten Abbildungen für dieses Whitepaper zu erzeugen. Zum Trainieren eines neuronalen Netzes reicht sie jedoch nicht aus. Ein auf derart idealisierten Daten trainiertes Netz würde bei synthetischen Bildern aus derselben Simulation gut abschneiden – auch bei Bildern, die es während des Trainings nie gesehen hat –, an echten RAW-Dateien von echten Kameras aber scheitern.
Reale RAW-Bilder unterscheiden sich in unzähligen Aspekten von einer einfachen Simulation:
Rauschen ist nicht rein weißes Gaußsches Rauschen. Das Photonenrauschen – auch als Schrotrauschen bezeichnet – ist tatsächlich weiß und signalabhängig, eine Eigenschaft, die direkt aus der Physik des Lichts resultiert. Reale Sensordaten setzen sich aus einer Mischung aus Photonenrauschen und elektronischem Rauschen zusammen. Elektronisches Rauschen — etwa Ausleserauschen, Dunkelstrom, Streifenbildung — kann räumliche Korrelationen, nicht-Gaußsche Ausreißer und feste Muster aufweisen, die sich je nach Sensorarchitektur unterscheiden.
Chromatische Aberration variiert über das gesamte Bildfeld hinweg. Laterale Farbverschiebungen sind nicht gleichmäßig verteilt: Ihre Stärke und Richtung verändern sich von der Bildmitte zu den Ecken hin und folgen den optischen Eigenschaften des jeweiligen Objektivs.
„RAW“ Dateien sind nicht wirklich RAW. Bevor die Daten auf die Speicherkarte geschrieben werden, führt die Kamera eine Reihe von internen Verarbeitungsschritten durch, die das Signal verändern: Schwarzwert-Korrektur, Subtraktion von feststehendem Musterrauschen, statische Korrektur defekter Pixel und Interpolation von Fokuspixeln. Manche Hersteller gehen sogar noch einen Schritt weiter und wenden auf das, was sie als RAW-Daten bezeichnen, verlustbehaftete Komprimierung oder sogar eine Form der Rauschminderung an.
Das Verhalten eines Sensors ändert sich mit seiner Nutzung. Das Rauschverhalten kann sich je nach Sensortemperatur, verwendetem Verschluss (mechanisch oder elektronisch) und weiteren Einsatzbedingungen verändern. All diese Faktoren unterscheiden sich je nach Hersteller und Kamerageneration. Die Hersteller dokumentieren ihre internen Verarbeitungsprozesse nicht. Was genau sie dabei tun, lässt sich nur durch sorgfältige Beobachtung erschließen.
Die Lücke schließen
Seit 2018 nutzt DxO alle verfügbaren Mittel, um die Verteilungslücke zu minimieren: zwei Jahrzehnte Erfahrung in der Bildsignalverarbeitung sowie insbesondere eine firmeneigene Kalibrierungsdatenbank, die in der Branche ihresgleichen sucht. Für jedes unterstützte Kameragehäuse und jede ISO-Einstellung hat das Labor von DxO Kalibrierungsbilder aufgenommen und analysiert – sowohl fotografische Motive als auch Dunkelbilder. Ziel war es, nicht nur die Standardabweichung des Rauschens zu bestimmen, sondern sein vollständiges statistisches Profil zu erfassen: seine Verteilung, mögliche räumliche Korrelationen infolge der kamerainternen Verarbeitung sowie die Art und Weise, wie sich diese Eigenschaften über den Sensor hinweg und unter unterschiedlichen Betriebsbedingungen verändern. Diese Datenbank, die ursprünglich für DxOs klassische Algorithmen zur Rauschminderung aufgebaut wurde, erwies sich als unschätzbar wertvolle Grundlage für das Training neuronaler Netze.
Manchmal zeigen sich bei bestimmten Kameras jedoch Lücken, die von der bestehenden Simulation nicht abgedeckt werden. Ein aktuelles Beispiel veranschaulicht diese Herausforderung: Fujifilms X-Trans-Sensoren der 4. und 5. Generation, bei denen sich im Vergleich zu den ersten drei Generationen etwas verändert hat. Trotz intensiver Bemühungen gelang es unserer DeepPRIME XD2-Trainingspipeline nie, für diese Sensoren zufriedenstellende Ergebnisse zu erzielen. Aus diesem Grund wurden DeepPRIME XD2 und XD2s ausschließlich für Bayer-Sensoren veröffentlicht.
Für DeepPRIME XD3 hatte die korrekte Unterstützung dieser Sensoren höchste Priorität. Über mehrere Monate hinweg analysierte das Team im Detail, worin sich die neueren X-Trans-Sensoren von ihren Vorgängern unterscheiden, und passte die Synthese der Trainingsdaten systematisch an. Auf diese Weise konnte die Verteilungslücke so weit reduziert werden, dass das Netz die erlernten Modelle zuverlässig auf reale Aufnahmen dieser Kameras übertragen konnte.
Die beste Architektur finden
Die Hinzunahme einer dritten Aufgabe und der Anspruch an eine bessere Demosaicing-Qualität erforderten ein leistungsfähigeres Netz. Das Team startete mit einer umfassenden Untersuchung. Transformer-Architekturen, die heute viele Bereiche des Deep Learning dominieren, wurden zusammen mit mehreren Designs konvolutionaler neuronaler Netze (CNN) getestet. Für genau diese Aufgabe — die Rekonstruktion feiner, lokaler Bilddetails aus verrauschten und unvollständigen Daten — erwiesen sich CNNs als die effektivere Lösung. Ihre inhärent lokal begrenzte Ausrichtung, die sich auf kleine räumliche Bereiche konzentriert, begünstigt eine effektive Glättung des Rauschens, ohne dabei Strukturen zu erzeugen, die im Originalbild nicht vorhanden sind. Transformer-Architekturen, die auf die Modellierung weitreichender Abhängigkeiten ausgelegt sind, neigten eher dazu, Rauschen bestehen zu lassen, als es wirksam zu unterdrücken. Für einen Rauschminderungsalgorithmus erweist sich die Tendenz eines CNN zur lokalen Regelmäßigkeit als klarer Vorteil und keineswegs als Einschränkung.
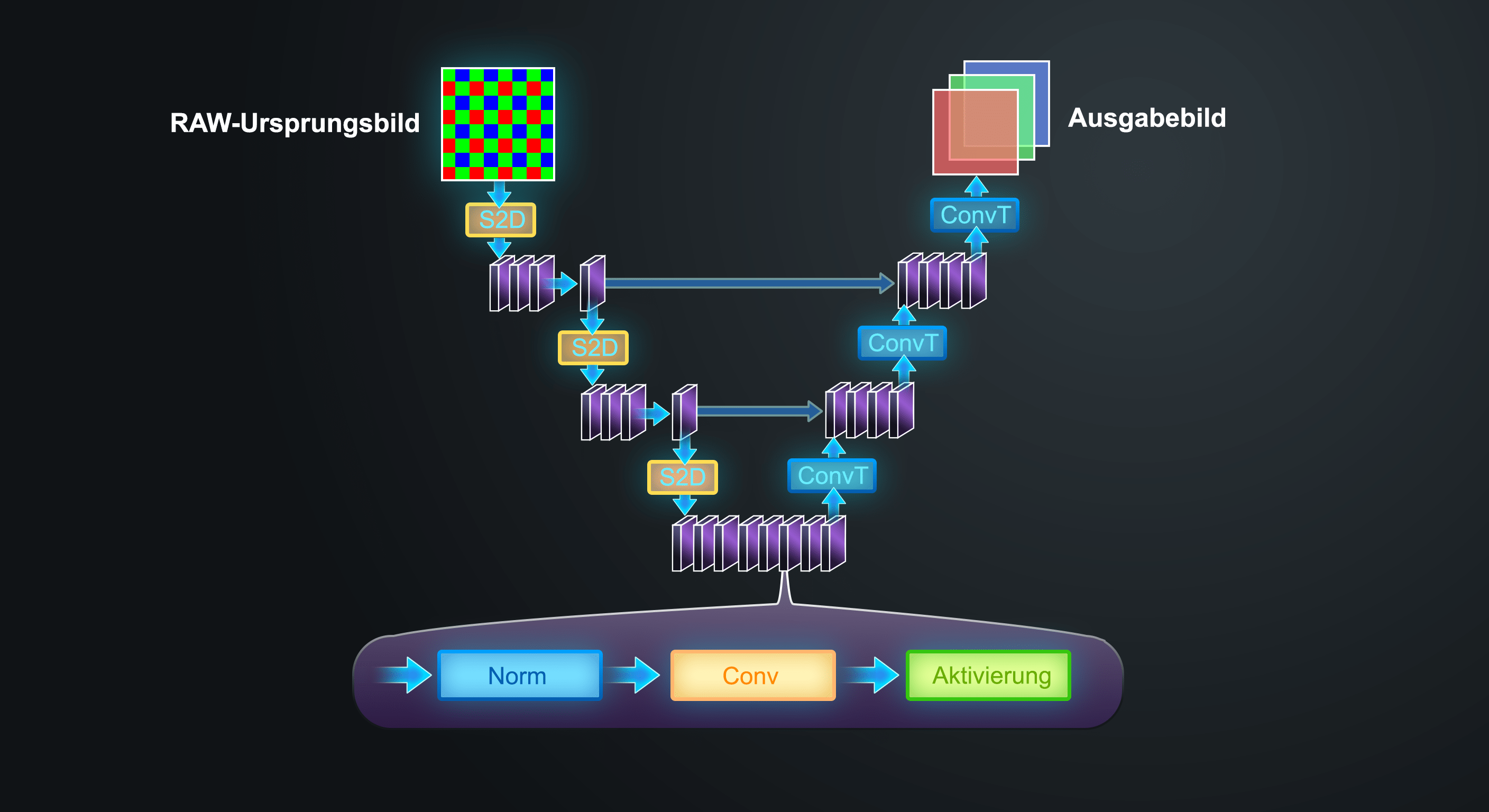
Ein früher Prototyp von DeepPRIME XD3 erreichte zwar die angestrebte Bildqualität, war jedoch rund dreimal langsamer als DeepPRIME XD2s — deutlich zu langsam für ein Produktionswerkzeug, das auf Tausende von Bildern angewendet wird. Die Herausforderung bestand also darin, eine Architektur zu finden, die ebenso intelligent arbeitet und dabei dieselbe Rechnerleistung erfordert. Das Team untersuchte verschiedene Designs für Faltungsblöcke, setzte separierbare Faltungen anstelle der in früheren Generationen verwendeten vollständigen 3D-Faltungen ein, testete unterschiedliche Aktivierungsfunktionen und variierte den Rechenaufwand, der den einzelnen Ebenen des U-Net zugewiesen wurde.
Jede der in Frage kommenden Architekturen wurde etwa drei Wochen lang auf einer Nvidia H100 GPU trainiert. Insgesamt wurden rund 50 Konfigurationen evaluiert, was einer kumulierten Rechenzeit von etwa drei Jahren auf H100-GPUs entspricht — ausschließlich für die Erforschung der Architektur.
Dieser gesamte Prozess wurde zweimal durchgeführt: zunächst für X-Trans, anschließend für Bayer. Dies ist der Hauptgrund, warum die Bayer-Version erst jetzt in DxO PureRAW 6 erscheint, während die X-Trans-Version bereits sechs Monate zuvor in DxO PhotoLab9 veröffentlicht wurde.
Das Ergebnis ist ein Netz mit deutlich mehr Parametern als DeepPRIME XD2s, dessen Architektur jedoch so gestaltet wurde, dass die Inferenzzeit auf handelsüblicher Hardware weitgehend unverändert bleibt. Mehr gewichtete Parameter, mehr Intelligenz, aber keine spürbare Einbuße bei der Verarbeitungsgeschwindigkeit.
Wiedereinführung von Rauschen – ein neuer Ansatz
Vor fast zwanzig Jahren machten die Forschungsingenieure von DxO eine Beobachtung, die bis heute Gültigkeit hat: Es ist sehr schwierig, einen Rauschminderungsalgorithmus so zu gestalten, dass er nur einen Teil des Rauschens entfernt. Rauschunterdrückungsverfahren — von den frühen Wavelet- und Non-Local-Means-Filtern bis hin zu modernen neuronalen Netzen — erzielen in der Regel die besten Ergebnisse, wenn sie darauf ausgelegt sind, möglichst sämtliches Rauschen zu entfernen. Der Versuch, Rauschen nur teilweise zu entfernen, führt hingegen häufig zu unerwünschten Artefakten. Je leistungsfähiger der Rauschfilter, desto mehr Details bleiben erhalten; dennoch entfernen selbst die besten Verfahren neben dem Rauschen unweigerlich auch einige feine Bildstrukturen.
Vollständig entrauschte Bilder wirken oft unnatürlich glatt. Deshalb verfolgen unsere Forscher einen einfachen, aber effektiven Ansatz: Zuerst wird das Rauschen vollständig entfernt, danach wird ein kleiner Teil davon wieder in das Bild zurückgerechnet, damit seine natürliche Struktur erhalten bleibt. Das Wiedereinführen eines Teils des ursprünglichen Rauschens — anstelle von synthetischem weißem Rauschen — bietet einen entscheidenden Vorteil: Es stellt zugleich einen Teil der feinen Bilddetails wieder her, die während der Verarbeitung verloren gegangen sind. Das erste Produkt mit dieser Technik war DxO OpticsPro 5, das 2008 auf den Markt kam. Auch wenn DeepPRIME XD3 deutlich leistungsfähiger ist als die Rauschunterdrückungs- und Demosaicing-Algorithmen jener Zeit, bleibt das zugrunde liegende Prinzip weiterhin gültig.
Für DxO PureRAW 6 haben wir die Wechselwirkung zwischen dieser Wiedereinführung von Rauschen und unseren Objektivkorrekturen grundlegend überarbeitet, insbesondere im Hinblick auf Vignettierung und Verzeichnungskorrektur. Beide Korrekturen greifen nun, bevor das Restrauschen wieder ins Bild zurückkehrt. So lassen sich das eigentliche Bildsignal und die Rauschanteile bewusst unterschiedlich berücksichtigen.
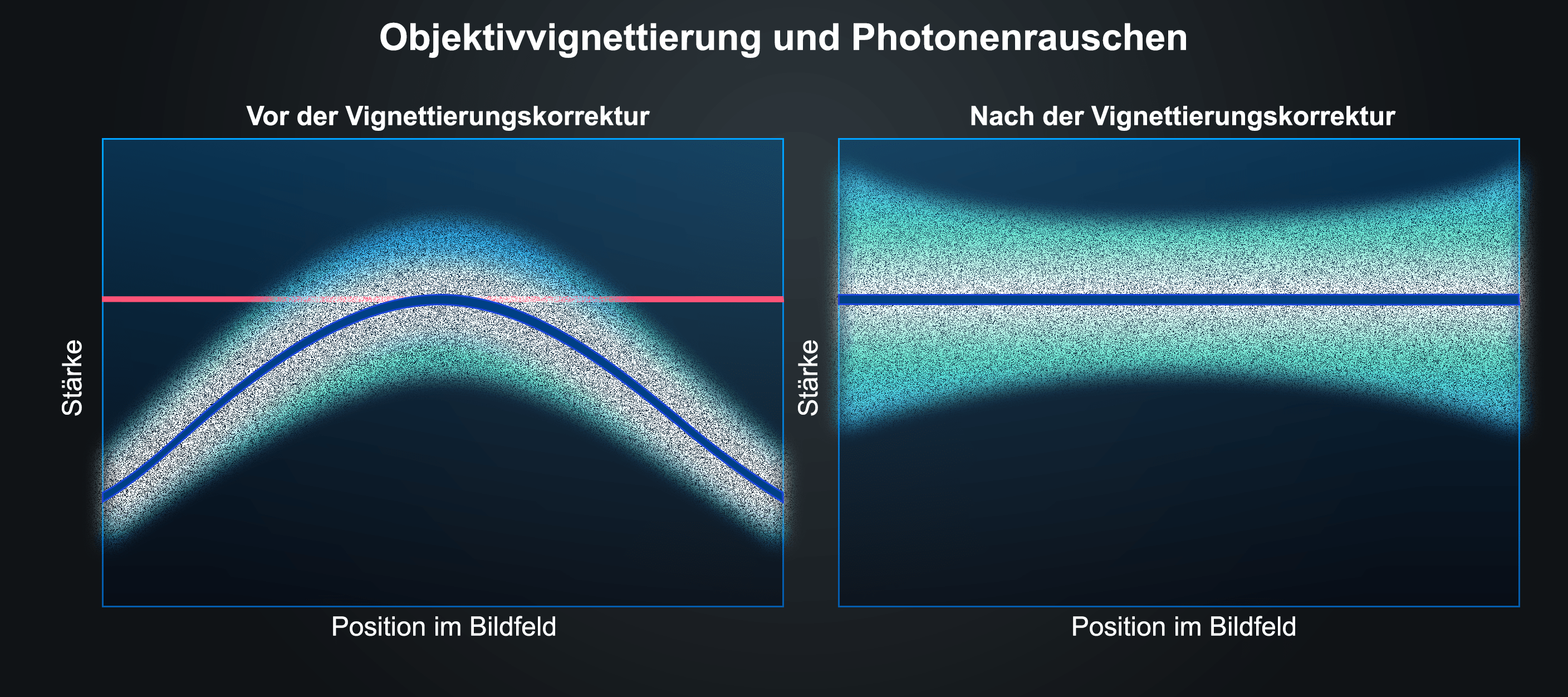
Vignettierung. Das Ausmaß des Bildrauschens in RAW-Bildern hängt in nichtlinearer Weise vom Signalpegel ab. Bei einem Objektiv mit starker Vignettierung nimmt das Signal-Rausch-Verhältnis im Randbereich deutlich ab. Wenn wir die Bildränder aufhellen, um eine gleichmäßige Helligkeit zu erzielen, verstärken wir zugleich das dort vorhandene Rauschen, sodass es an den Rändern sichtbarer wird als in der Bildmitte. Die Lösung besteht darin, das Rauschmodell — die bekannte Beziehung zwischen Signal- und Rauschpegel — zu nutzen, um einen Korrekturfaktor abzuleiten, der ein gleichmäßiges Rauschverhalten über das gesamte Bild hinweg sicherstellt. Dieser Faktor wird auf das Rauschen angewendet, bevor es dem Bild wieder hinzugefügt wird.
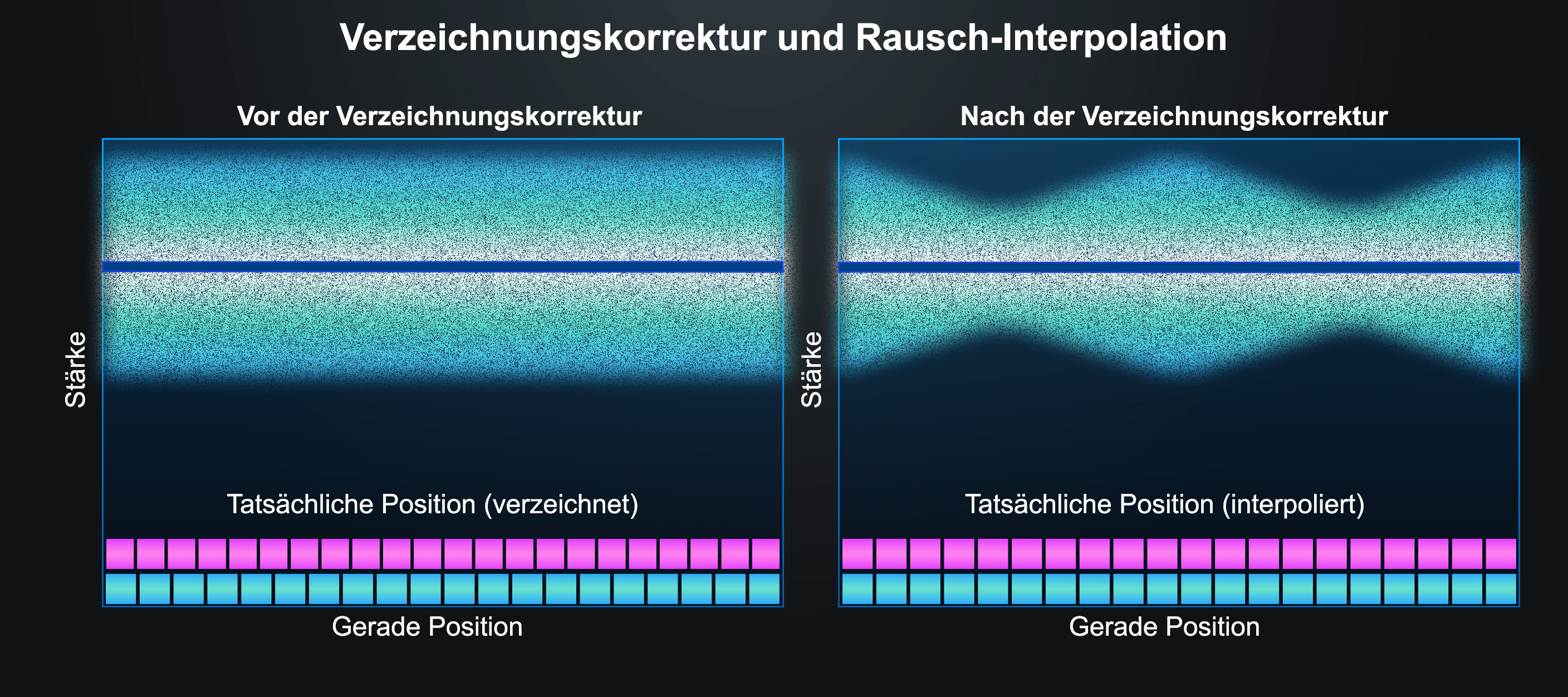
Verzeichnung. Die Verzeichnungskorrektur erfordert eine geometrische Interpolation des Pixelrasters. Wird diese Interpolation auf weißes Rauschen angewendet, entstehen zwei unerwünschte Effekte: Zum einen bildet sich eine künstliche Struktur im Rauschmuster, zum anderen treten periodische Schwankungen im Rauschpegel auf. An Stellen, an denen die interpolierte Koordinate mit einem realen Pixel übereinstimmt, bleibt das Rauschen unverändert erhalten. Liegt die Koordinate hingegen zwischen zwei Pixeln, wird das Rauschen durch die Interpolation geglättet und verliert an Stärke. In DxO PureRAW 6 lösen wir dieses Problem, indem wir einen speziell entwickelten Interpolationsalgorithmus getrennt auf die Rauschkomponente anwenden. Dadurch bleibt deren Intensität auch nach der Verzeichnungskorrektur gleichmäßig.
Beide Effekte treten besonders bei hohen ISO-Werten deutlich hervor, da das verbleibende Rauschen — selbst wenn es nur einen Bruchteil des ursprünglichen Rauschens darstellt — deutlich wahrnehmbar bleibt.
Diese überarbeitete Wiedereinführung von Rauschen kommt sowohl in DeepPRIME 3 als auch in DeepPRIME XD3 zum Einsatz. Dies ist ein gutes Beispiel dafür, wie sehr uns auch die kleinsten Details am Herzen liegen: Unser Anspruch ist nicht „nur“, den besten Rauschminderungsalgorithmus der Welt zu bauen, sondern die weltweit beste Engine für RAW-Konvertierung.
Die Ergebnisse
Die tatsächliche Wirkung all dieser Fortschritte hängt vom Bildinhalt und den Aufnahmeparametern ab. Im Vergleich zu DeepPRIME XD, das DeepPRIME XD3 für X-Trans-Sensoren ablöst, liefert die neue Engine in der Regel sauberere und natürlichere Ergebnisse. Im Vergleich zu DeepPRIME 3 liefert die neue Engine bei allen ISO-Empfindlichkeiten fast immer Bilder, die sowohl rauschärmer als auch detailreicher sind. Der Unterschied zu DeepPRIME XD2s fällt subtiler aus: DeepPRIME XD3 zeigt seine Stärken vor allem bei Bildern mit feinen Texturen, lichtstarken Objektiven, Sensoren ohne optischen Tiefpassfilter sowie bei Objektiven, die zu chromatischer Aberration neigen. Die Verbesserungen beim Demosaicing und bei der Korrektur chromatischer Aberration zeigen sich vor allem bei niedrigen ISO-Werten, während die optimierte Detailerhaltung insbesondere bei mittleren bis hohen ISO-Einstellungen zum Tragen kommt.
Für leidenschaftliche Fotografen.